在这一节我们介绍PVD(Parallel Variable Distribution)算法,也就是所谓的并行变量分配算法
考虑如下的无约束非线性优化问题:
\[\min_{x\in \mathbb{R}^{n}} f(x) \tag{7.1.1}\]其中$f(x):\mathbb{R}^{n}\rightarrow \mathbb{R}^{1}$为连续可微函数。
PVD算法概要
假设可以同时使用 $p$ 个处理机,将问题的变量 $x\in \mathbb{R}^{n}$ 分成 $p$ 块 $x_{1},x_{2},\ldots,x_{p}$ ,第 $l$ 块的变量维数为 $n_{l}$ ,同时 $x$ 的分块满足
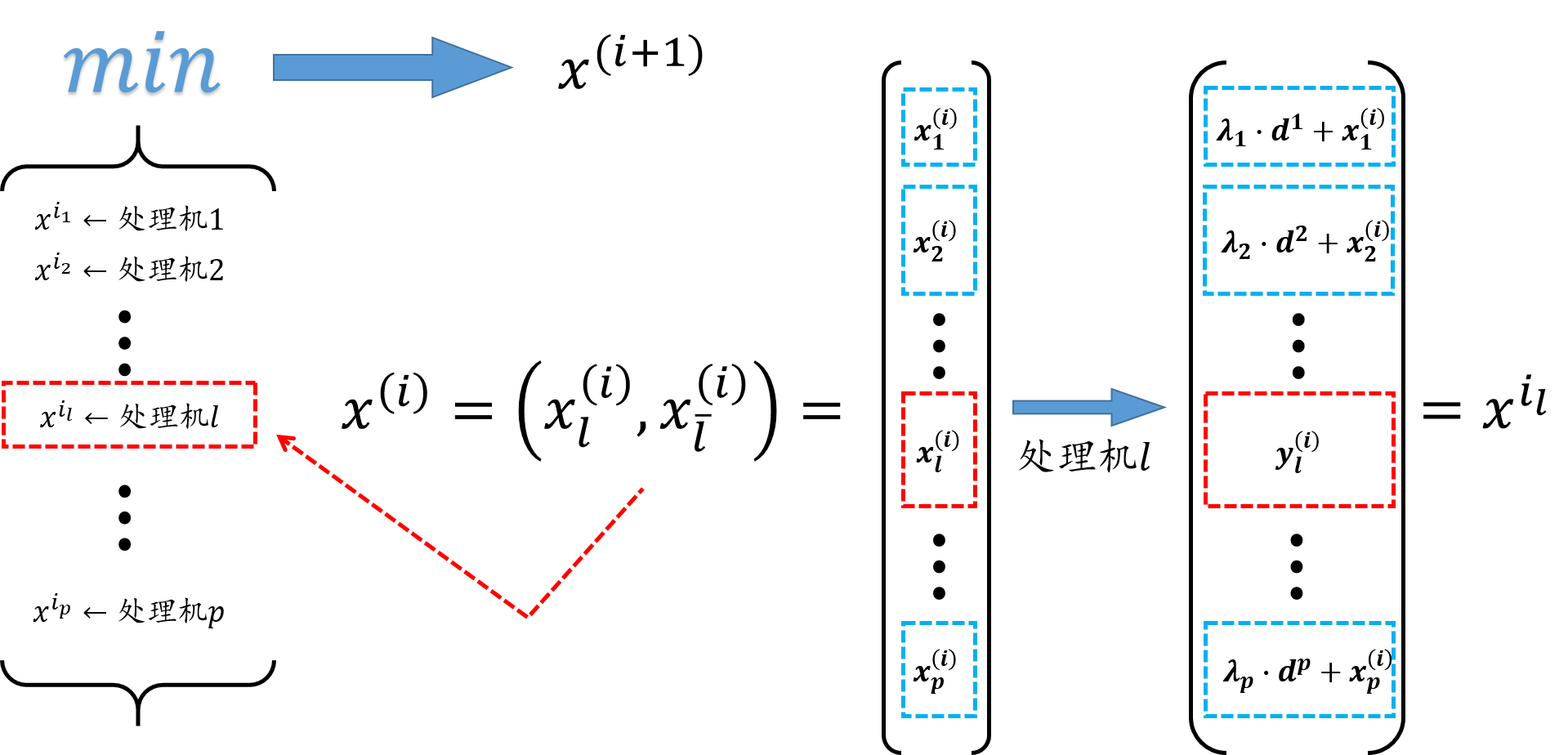
\[x=(x^{T}_{1},\ldots,x^{T}_{p})^{T}, x\in \mathbb{R}^{n_{l}}, l=1,2,\ldots,p, \sum_{l=1}^{p} n_{l} = n. \notag\]将这 $p$ 块变量分配到 $p$ 个处理机上,在每一步根据分块的方式将原问题相地分解为维数较小的 $p$ 个子问题上,每个处理机不仅仅计算自己负责变量的更新,同时沿着给定的方向(每次并行计算之前都要提前给定方向),更新其余处理机对应变量的移动步长,这个称之为”Forget me not”(勿忘我),个人理解:每个处理机不只是更新自己的那部分变量,然后选择 $p$ 个处理机得到的结果中最优的一个作为变量的下一次迭代值 $x^{(i+1)}$.
PVD算法的计算步骤
步骤 $0$ 给定初始点 $x^{0}\in \mathbb{R}^{n}$,任取PVD方向 $\boldsymbol{d}^0\in \mathbb{R}^{n}$ (可以任意选取,如取 $\boldsymbol{d}^{i}=-\nabla f(x^{(i)})/\Vert \nabla f(x^{(i)}) \Vert$ ).令 $i=0$.若 $\nabla f(x^{(i)}) = \mathbf{0}$.取最优解 $\boldsymbol{x}^{*} = \boldsymbol{x}^{(i)}$ ,算法停止;否则按照如下步骤计算 $\boldsymbol{x}^{(i+1)}$ .
步骤 $1$ (并行计算) 对每个处理机 $l\in \{1,2,\ldots,p\}$ ,计算下面问题的一个近似解 $( \boldsymbol{y}_ {l}^{i},\boldsymbol{\lambda}_ {\bar{l}}^{i} ) \in \mathbb{R}^{n_{l}} \times \mathbb{R}^{p-1}$ :
\[\begin{aligned} \min_{(\boldsymbol{x}_l,\boldsymbol{\lambda}_{\bar{l}})} \psi_{l}^{i} (\boldsymbol{x}_{l},\boldsymbol{\lambda}_{\bar{l}}) &= f(\boldsymbol{x}_{l},\boldsymbol{x}_{\bar{l}}^{(i)} + \boldsymbol{D}_{\bar{l}}^{i}\boldsymbol{\lambda}_{\bar{l}}), \\ \boldsymbol{x}^{i_{l}} &= (\boldsymbol{y}_{l}^{i},\boldsymbol{x}_{\bar{l}}^{(i)} + \boldsymbol{D}_{\bar{l}}^{i}\boldsymbol{\lambda}_{\bar{l}}^{i}). \end{aligned} \tag{7.1.2}\]步骤 $2$ (同步运算) 计算 $x^{(i+1)}$ ,使其满足下面不等式
\[f(\boldsymbol{x}^{(i+1)}) \leq \min_{l\in \{1,2,\ldots,p\}} f(\boldsymbol{x}^{i_{l}}) = \psi_{l}^{i} (\boldsymbol{y}_ {l}^{i},\boldsymbol{\lambda}_ {\bar{l}}^{i}) \tag{7.1.3}\]令 $i = i + 1$ ,选取新的方向 $d^{i}$; 重复上述步骤.
上述算法中, $\bar{l}$ 表示 $l$ 在集合 $\{1,2,\ldots,p\}$ 中的补集, $D^i_{\bar{l}}$ 为 $(n - n_l)\times(p-1)$ 矩阵,其由相应的PVD方向 $d^i$ (除了第 $l$ 块变量外) 放在矩阵的对角线位置而构成,如下所示
\[\boldsymbol{D}^i_l = \begin{bmatrix} d^i_1 & & & & & & \\ & d^i_2 & & & & &\\ & &\ddots & & & &\\ & & &d^i_{i-1} & & &\\ & & & &d^i_{i+1} & &\\ & & & & &\ddots &\\ & & & & & &d^i_p \end{bmatrix}. \tag{7.1.4}\]我们通过下面是示意图来理解一下PVD算法做了什么,着重注意步骤 $1$,其实处理器 $l$ 在第 $i$ 次迭代,做了件什么事情呢,就是寻找将 ${x^{(i)}_ l}$ 进行改变,其他处理器对应的方向寻找一个步长系数 ${\lambda}$ 乘上去。所以,针对这 ${p-1}$ 维的 ${\lambda_{\bar{l}}}$ 和 ${n_l}$ 维的 ${x_l}$ 求最小值。
PVD算法的收敛性
下面来讨论一下一下PVD算法的收敛性。首先声明一些记号,对于连续可微的函数 $f:\mathbb{R}^n\rightarrow \mathbb{R}^1$,我们用 $\nabla f$ 来表示 $f$ 的梯度,所谓的梯度是对自变量的 $x$ 的每个分量求偏导,这里用 $\nabla_l f$ 表示 $f$ 关于 $\boldsymbol{x}_l \in \mathbb{R}^{n_l}. l = 1,2,\ldots,p$ 的梯度. 如果 $f$ 在 $\mathbb{R}^n$ 上有连续的一阶偏导数,则记为 ${f\in C^1(\mathbb{R}^n)}$. 如果 ${f}$ 在 ${\mathbb{R}^n}$ 上有常数为 ${K}$ 的 Lipschitz 连续一阶偏导数.即
则记为 ${f\in LC^1_K(\mathbb{R}^n)}$.
引理 7.1.1 如果实数序列 $\{f_i\}$ 不增且有聚点 $\bar{f}$,则 $\{f_i\}$ 收敛到 $\bar{f}$.
证明 首先证明序列 $\{f_i\}$ 下方有界.设 $f_{i_j} \rightarrow \bar{f}$. 若 $\{f_i\}$ 下方无界,则存在 $i,j$ 满足 $$\bar{f} > f_i (因为\{f_i\}是下方无界的),\notag$$ $$f_i \geq f_{i_j} (因为\{f_i\}是非增序列),\notag$$ $$f_{i_j} \geq \bar{f} (因为\{f_{i_j}\}非增加且收敛到\bar{f}).\notag$$ 矛盾!因此 $\{f_i\}$ 是下方有界的,其又非增,所以一定收敛,且一定收敛到 $\bar{f}$. $\Box$引理 7.1.2 设 $f\in LC^1_k(\mathbb{R}^n)$,则 $$f(y)-f(x)-\nabla f(x)^T (y-x) \leq |f(y)-f(x)-\nabla f(x)^T (y-x)|\leq \frac{K}{2} {\Vert y-x \Vert}^2.\quad \forall x,y\in \mathbb{R}^n.\notag$$
证明 定理等价于证明下式上述定理证明思路来自于文献1.
PVD的收敛性证明
定理7.1.1(无约束PVD算法的收敛性) 设 ${f\in LC^1_K(\mathbb{R}^n)}$,序列 ${\{\boldsymbol{d}^i\}}$ 有界. 则算法产生的序列 ${\{\boldsymbol{x}^{(i)}\}}$ 或者终止于一个稳定点 ${\boldsymbol{x}^i}$,或者为无限序列,其聚点是 ${f}$ 的稳定点且 ${\lim\limits_{i\rightarrow \infty} \nabla f(\boldsymbol{x}^{(i)}) = \mathbf{0}}$
证明 对 ${l=1,\ldots,p}$,对 ${\psi_l^i}$ 求梯度,有${\nabla \psi^i_l (\boldsymbol{x}_l,\boldsymbol{\lambda}_{\bar{l}}) = \left[\nabla_l f(\boldsymbol{x}_{l},\boldsymbol{x}_{\bar{l}}^{(i)} + \boldsymbol{D}_{\bar{l}}^{i}\boldsymbol{\lambda}_{\bar{l}}),\nabla_l f(\boldsymbol{x}_{l},\boldsymbol{x}_{\bar{l}}^{(i)} + \boldsymbol{D}_{\bar{l}}^{i}\boldsymbol{\lambda}_{\bar{l}})\boldsymbol{D}_{\bar{l}}^{i}\right]. \tag{7.1.5} }$
我们设 ${w=(x_l,\lambda_{\bar{l}})}$,定义 ${n\times(n_l+p-1)}$ 维矩阵 ${\tilde{D}^i_l}$ 为 $$ \tilde{D}^i_l = \begin{bmatrix} d^i_1 & & & & & & &\\ &d^i_2 & & & & & &\\ & &\ddots & & & & &\\ & & &d^i_{i-1} & & & &\\ & & & &\boldsymbol{I}_{n_l} & & &\\ & & & & &d^i_{i+1} & &\\ & & & & & &\ddots &\\ & & & & & & &d^i_p \end{bmatrix}. \notag $$ 其中,${\boldsymbol{I}_{n_l}}$ 表示 ${n_l}$ 阶方阵,并记 ${\tilde{x}^{(i)}_{l} \triangleq (\mathbf{0}_{n_l},x^{(i)}_{\bar{l}})}$,所以 ${ \psi_l^i (\boldsymbol{x}_l,\boldsymbol{\lambda}_{\bar{l}}) = \psi_l^i(w) = f(\tilde{D}^i_l w + \tilde{x}^{(i)}_{l})}$,则 $$\nabla \psi^i_l (\boldsymbol{x}_l,\boldsymbol{\lambda}_{\bar{l}}) = \nabla f(\tilde{D}^i_l w + \tilde{x}^{(i)}_{l})\tilde{D}^i_l = [\nabla_l f(\boldsymbol{x}_{l},\boldsymbol{x}_{\bar{l}}^{(i)} + \boldsymbol{D}_{\bar{l}}^{i}\boldsymbol{\lambda}_{\bar{l}}),\nabla_l f(\boldsymbol{x}_{l},\boldsymbol{x}_{\bar{l}}^{(i)} + \boldsymbol{D}_{\bar{l}}^{i}\boldsymbol{\lambda}_{\bar{l}})\boldsymbol{D}_{\bar{l}}^{i}]. \notag$$因为 ${f}$ 的梯度是 Lipschitz 连续,又 ${\{\boldsymbol{d}^i\}}$ 有界,故 ${\psi_l^i}$ 也是 Lipschitz 连续的.
对于 ${\psi_l^i(w)}$ 的梯度 $$ \begin{align} \left\| \nabla \psi(x) -\nabla\psi(y) \right\| &= \left\| \left[\nabla f(\tilde{D}^i_l x + \tilde{x}^{(i)}_{l}) - \nabla f(\tilde{D}^i_l y + \tilde{x}^{(i)}_{l}) \right] \tilde{D}^i_l \right\| \notag\\ & \leq \left\| \tilde{D}^i_l \right\| \cdot \left\| \nabla f(\tilde{D}^i_l x + \tilde{x}^{(i)}_{l}) - \nabla f(\tilde{D}^i_l y + \tilde{x}^{(i)}_{l}) \right\| \notag\\ & \leq \left\| \tilde{D}^i_l \right\| \cdot K \cdot \left\| \tilde{D}^i_l x + \tilde{x}^{(i)}_{l} - \left(\tilde{D}^i_l y + \tilde{x}^{(i)}_{l} \right) \right\| \notag\\ & \leq {\left\| \tilde{D}^i_l \right\|}^2 \cdot K \cdot \left\|x-y\right\|,\quad \forall x,y\in \mathbb{R}^{n_l+p-1}.\notag \end{align}. \notag $$ 这里面,两次用到 ${\left\|\tilde{D}^i_l w \right\| \leq \left\|\tilde{D}^i_l \right\| \cdot \left\| w \right\|}$,可以认为 ${\tilde{D}^i_l}$ 是一种线性算子,容易验证其为连续(有界)的算子,那么根据泛函有界线性算子的范数定义 ${\left\|A\right\| = sup\{\left\|Ah\right\|:\left\|h\right\|=1}\}$,可以得出 ${\left\|Ah \right\| \leq \left\|A \right\| \cdot \left\| h \right\|}$.PVD线性收敛性
定理7.1.2(无约束PVD算法的线性收敛性)设 ${f\in LC^1_k(\mathbb{R}^n)}$,序列 ${\{\boldsymbol{d}^i\}}$ 有界,且函数 ${f}$ 是强凸,即存在常数 ${\kappa \geq 0}$,使得(强凸函数的定义,比严格凸更强的定义)
$$
f(\boldsymbol{y}) - f(\boldsymbol{x}) - \nabla f(\boldsymbol{x})(\boldsymbol{y} - \boldsymbol{x}) \geq \frac{\kappa}{2} \left\| \boldsymbol{y} - \boldsymbol{x} \right\| ^2, \quad \forall \boldsymbol{y},\boldsymbol{x} \in \mathbb{R}^n, \tag{7.1.16}
$$
或者等价地,
$$
\left(\nabla f(\boldsymbol{y}) - \nabla f(\boldsymbol{x})\right)(\boldsymbol{y} - \boldsymbol{x}) \geq \kappa \left\| \boldsymbol{y} - \boldsymbol{x} \right\|^2, \quad \forall \boldsymbol{y},\boldsymbol{x} \in \mathbb{R}^n, \tag{7.1.17}
$$
则PVD算法产生的点列 ${\{\boldsymbol{x}^{(i)}\}}$ 线性收敛到问题(7.1.1)的唯一解 ${\overline{\boldsymbol{x}}}$,且存在常数 ${K>0}$,使收敛速率为
$$
\left\| \boldsymbol{x}^{(i)} - \overline{\boldsymbol{x}} \right\| \leq \left(\frac{2}{\kappa} \left(f(\boldsymbol{x}^{(0)})-f(\overline{\boldsymbol{x}})\right) \right)^{\frac{1}{2}} \left(1-\frac{1}{p} \left(\frac{\kappa}{K}\right)^2 \right)^{\frac{i}{2}}.\notag
$$
证明 根据 ${f}$ 的强凸性质,因此 ${\{\boldsymbol{x}^{(i)}\}}$ 至少存在一个极限点 ${\overline{\boldsymbol{x}}}$,根据定理7.1.1,${\{\boldsymbol{x}^{(i)}\}}$ 的任意一个聚点 ${\overline{\boldsymbol{x}}}$ 是问题(7.1.1)的稳定点,根据 ${f}$ 的凸性,其也是问题(7.1.1)的极小点. 再根据 ${f}$ 的严格凸性,其有唯一的极小值点,所以PVD算法产生的点列收敛到唯一解 ${\overline{\boldsymbol{x}}}$.
下面讨论其线性收敛速率. 根据 ${f}$ 的强凸性质,以及 Cauchy-Schwarz 不等式,有
可以发现,PVD算法的收敛速率,受制于一个线性收敛的数列。但是,处理机数量 ${p}$ 增大,收敛速率下降(常数${\left(1-\frac{1}{p} \left(\frac{\kappa}{K}\right)^2\right)}$ 更趋近于 ${1}$). 这个结果其实有点反直觉的,同时非常让人失望,因为我们用了更多的处理器,但是收敛速度反而慢了. 有一些算法改进了PVD的方向,最终达到了线性收敛比与处理机个数无关的的效果.
Summary
1.PVD算法在并行阶段,将处理机 ${l}$ 对应的变量是完全自由的,同时其他变量对应的方向计算相应的步长,求得最小值点作为一个备选点。
2.同步计算时,选取备选点中最小的作为下一步迭代点,然后给出下一步的方向。
3.线性收敛算法,但是线性收敛比与处理机个数 ${p}$ 负相关或者无关。